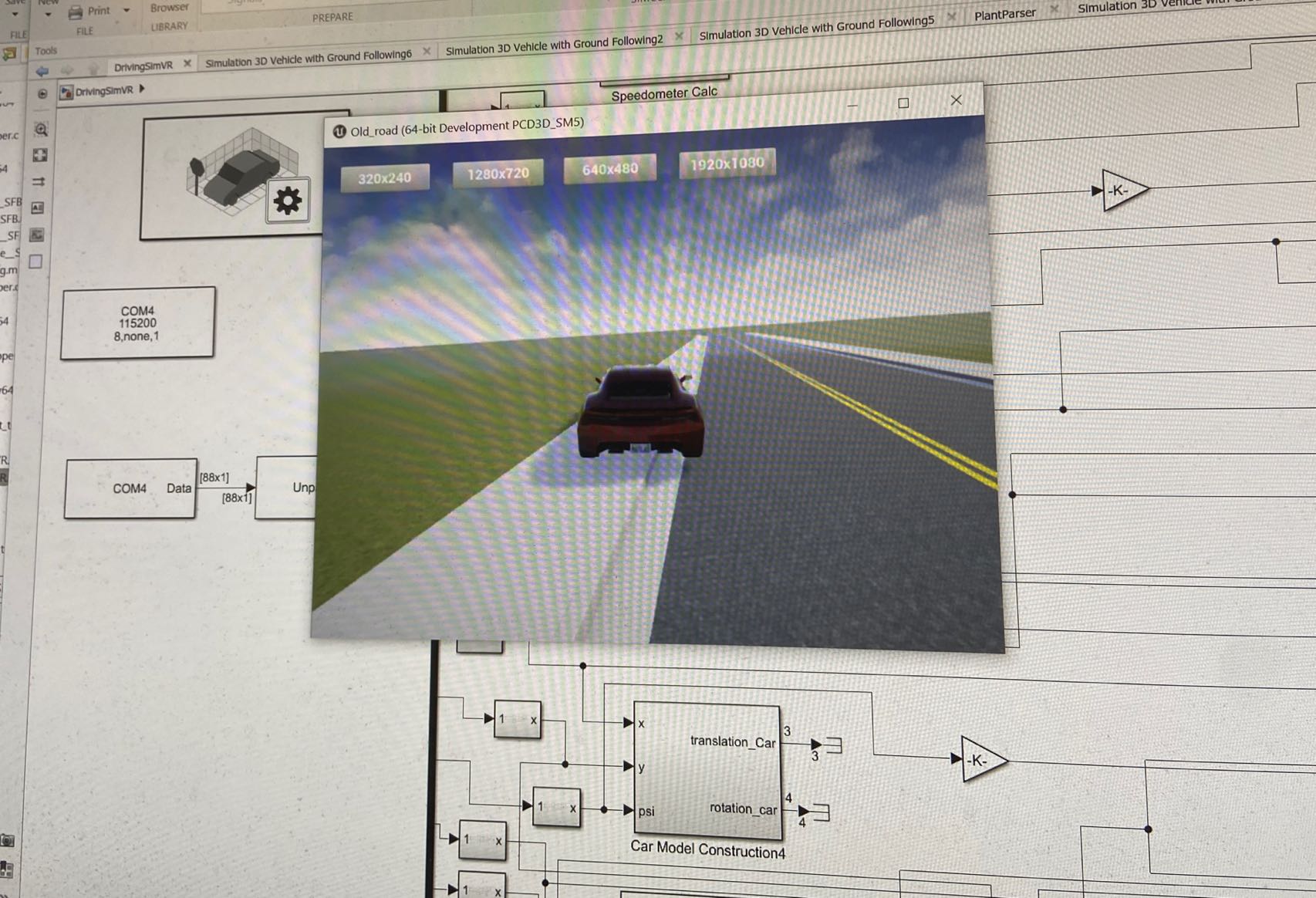
• Modeled a vehicle using MATLAB Simulink, and designed an adaptive cruise control (ACC) system using C language.
• Build the vehicle model subsystem using NXP toolkits to incorporate GPIO, PWN, QD, ADC to enable the potentiometer, dipswitch functionality and haptic wheel. Set up CAN(Control Area Network) and implement ACC subsystem by setting up position and velocity control. Implement automatic steering using Pick Lead Logic, which allows the car to following the leading car in the car groups with automatic steering switched on.